A.1. 出発局面
ボブの運動は一様ではないので、その局面ごとに別々に求める必要がある。まず出発し加速開始してから加速をやめるまでの間(これを「出発局面」とする。)の運動を求める。求め方は単純で、「4元速度を固有時で微分したもの」と「4元加速度」とが等しいという微分方程式を解くのである。その準備として、4元速度と4元加速度と固有時を未知関数で表すことから始める。
アリスの座標系で測った時刻 𝑡 におけるボブの速度(普通の3次元的な速度)の𝑥成分を未知関数 𝑣(𝑡) と置く。𝑦成分と𝑧成分は0である。するとアリスの座標系で測った時刻 𝑡 におけるボブの4元速度 は定義により
である。ここで添え字の0は𝑐𝑡成分、1は𝑥成分、2は𝑦成分、3は𝑧成分をそれぞれ表す。この を𝑐で割ったものを4元速度と定義する流儀もあるので、気を付けてほしい。
ボブの加速度は𝑥方向に一定の 𝑎 であり、4元加速度は (0, 𝑎, 0, 0) である。これは瞬間的にボブと同じ速度で動いている慣性系で測った値である。ここはちょっとわかりにくい。ボブの座標系でボブの加速度を測ったら、ボブはずっと空間原点にいるのだから加速度は0ではないか、と思うだろう。そのとおりである。しかしここで言っているのは一定速度 𝑣(𝑡) で運動する慣性系であって、それは時刻 𝑡 の瞬間にだけ速度がボブと一致する。つまりその慣性系から見るとボブの速度が0になるのはその一瞬だけである。それから(アリスの座標系で測って)無限小時間 d𝑡 が経過したのちはボブの速度は(アリスの座標系で測って) 𝑣(𝑡+d𝑡) になっており、このとき一定速度 𝑣(𝑡) で運動する慣性系で測ったボブの速度はもはや0ではない。時間当たりのその変化分が加速度 𝑎 である。
したがって、その4元加速度に対して速度 −𝑣(𝑡) に対応するローレンツ変換を施せばアリスの座標系での値になる。ローレンツ変換の場合は位置ベクトルの変換もそうでない4元ベクトルの反変成分の変換も変換式は同じである(一般の座標変換ではそうはいかない)。よって、アリスの座標系で測った時刻 𝑡 におけるボブの4元加速度 は
である。ところで今 𝑎 は正という設定であるが、この先の微分方程式を解くまでの式変形は 𝑎 の符号に依存しないことを意識してもらいたい。理由は、しばらくあとで 𝑎 に負の値を入れた式を使う予定だからだ。ただし 𝑎 は0ではないとする。
次に、ボブの固有時を 𝜏𝐵 とすると
である。(3)式はミンコフスキー座標において公式のようなものだが、忘れてしまったときは線素の式からスタートして次のように導けばよい。
この 𝜏𝐵 を𝑐倍したものを固有時と定義する流儀もあるので、気を付けてほしい。
これで準備は整った。今から解くべき、「4元速度を固有時で微分したもの」と「4元加速度」とが等しいという微分方程式は
である。添え字の 𝜇 には 0, 1, 2, 3 が入るのでこれは4個の式からなる連立方程式であるが、今は第2・3成分(𝑦, 𝑧成分)は 0 = 0 という恒等式になる。この後も第2・3成分はずっと0なのでこの章ではこれ以上書かない。第0・1成分については、(1)・(2)式で準備した
,
,
,
の具体的な表式を第0・1成分の方程式に代入すると、
のようになる。未知関数が1個しかないのに式が2個もあって、解が存在するのか不安になるかもしれないが、そこはうまくできているので心配はいらない。後で具体的に確認する。
これを解くには第1成分である(6)式を使う。
ここで初期条件 𝑡 = 0 のとき 𝑣(0) = 0 より積分定数は 𝐾₀ = 0 と決めることができるが、あとで一般解を使いたいので 𝐾₀ のまま式変形を続ける。
6行上を見ると 𝑣(𝑡) と 𝑎𝑡+𝐾₀ が同符号であることがわかるので、複号は正を採用し、
が一般解である。
ここで
という量がこの後何度も出てくるので先に計算しておく。
ところで(8)式の 𝑣(𝑡) の導出には今のところ微分方程式(4)式のうち第1成分である(6)式しか使っていないのであった。これが第0成分である(5)式をも満たしているかどうかを確認しよう。
以上より、左辺と右辺が等しいので確かに(5)式も成り立っている。
次にボブの固有時を求める。(3)式より、
となる。 は の逆関数である。最後の等号は微分の公式
を使った。(10)式を 𝑡 について解く。
これで座標時とボブの固有時とボブの速度(普通の3次元的な速度)の関係が明らかになった。せっかくだから速度を積分して、アリスの座標系で測った時刻 𝑡 におけるボブの位置 𝑥(𝑡) も求めておこう。
また、 𝑣(𝑡) と 𝑥(𝑡) をそれぞれ 𝜏𝐵 でパラメータ表示したものを求めると、(8)式より
であり、(14)式より
となる。
以上でボブの固有時と速度と位置の一般解が求まった。(13)・(10)・(8)・(15)・(14)・(16)式で得られた一般解を表2にまとめておく。
表2. 微分方程式(3)・(4)式の一般解
| 座標時 𝑡 による表示 | ボブの固有時 𝜏𝐵 によるパラメータ表示 |
|---|
| 座標時 |
|
𝑡 |
(13) |
|
| ボブの固有時 |
(10) |
|
|
𝜏𝐵 |
| ボブの速度 |
(8) |
|
(15) |
|
| ボブの位置 |
(14) |
|
(16) |
|
| (𝐾₀, 𝐾₁, 𝐾₂ は積分定数) |
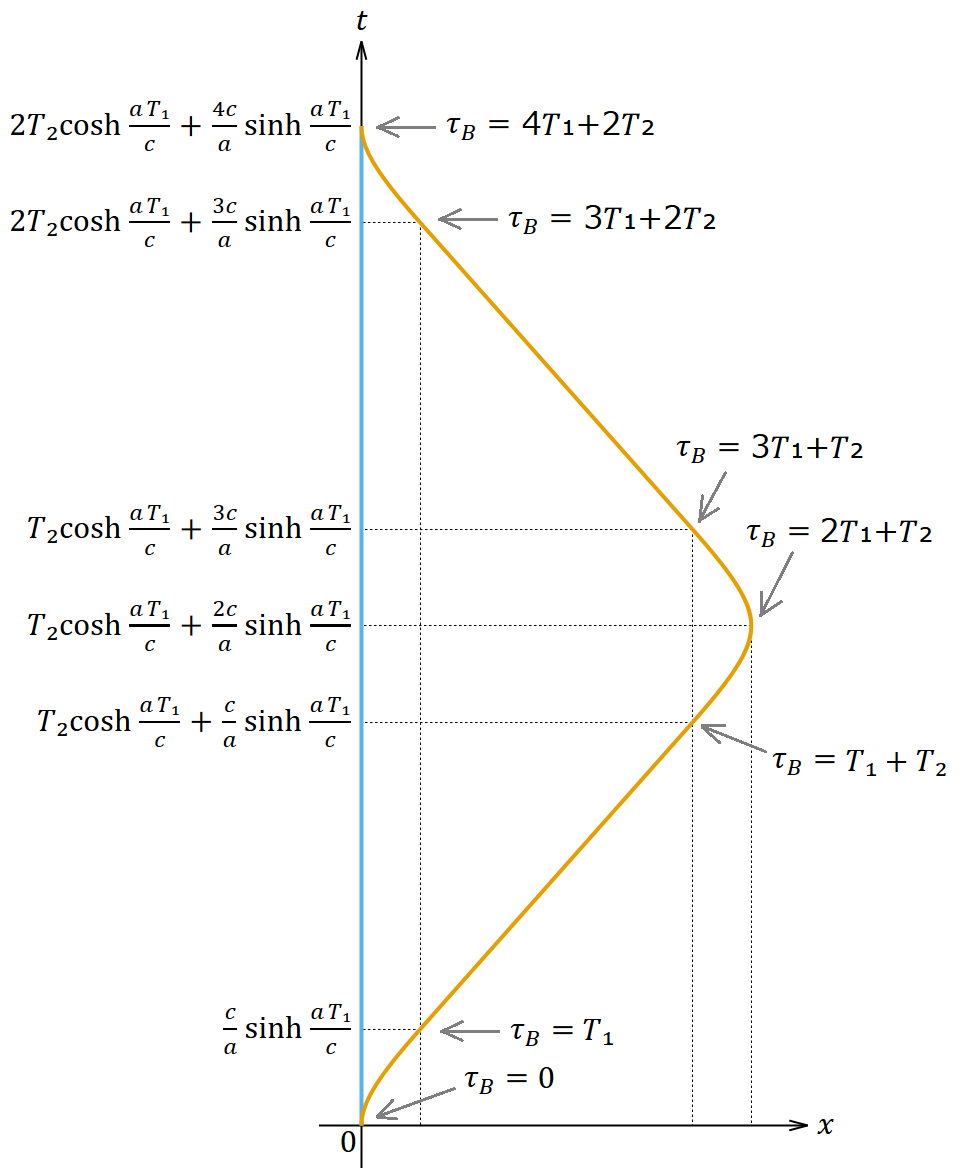
表2の右の列は、アリスの座標系で計算したボブの世界線の座標 (𝑡, 𝑥) をボブの固有時 𝜏𝐵 によってパラメータ表示したものである。ボブの座標系で計算したものではない。ボブの座標系で計算する作業は第B章で行う。
最初のほうで述べたように、この一般解は 𝑎 が0のときは使えないが0でなければ正でも負でも成り立つ。そして初期条件として例えば特定の時刻におけるボブの固有時と位置と速度を与えれば、積分定数 𝐾₀, 𝐾₁, 𝐾₂ が定まるわけである。
では具体的に出発局面の特殊解を求めよう。出発局面における初期条件は、時刻(座標時) 𝑡 = 0 のときボブの位置は 𝑥(0) = 0 、ボブの速度は 𝑣(0) = 0 であり、またボブの固有時も出発時を基準にしたいので 𝑡 = 0 のとき 𝜏𝐵 = 0 とする。これらを表2の一般解に代入すれば、簡単な計算により積分定数は
,
,
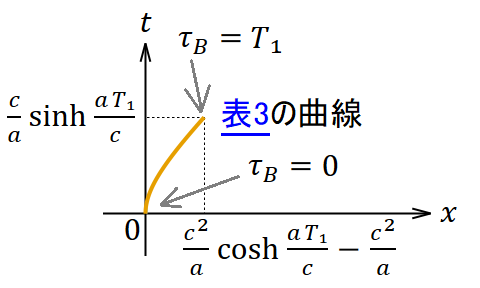
のように定まるので、特殊解は表3のようになる。
表3. 出発局面 (0 ≦ 𝜏𝐵 ≦ 𝑇₁) における微分方程式(3)・(4)式の特殊解
| 座標時 𝑡 による表示 | ボブの固有時 𝜏𝐵 によるパラメータ表示 |
|---|
| 座標時 |
𝑡 |
|
| ボブの固有時 |
|
𝜏𝐵 |
| ボブの速度 |
|
|
| ボブの位置 |
|
|
出発局面の終了時では、 𝜏𝐵 = 𝑇₁ であるからこれを表3の特殊解に代入すると、座標時は
、ボブの速度は
、ボブの位置は
である。