ひとつの考え方として、アリスに固定した座標系で特殊相対性理論を使ってすべての計算をした(すでに第A章でやった)あとで最後にその結果をボブに固定した座標系に座標変換する、という方法がある。相対性理論に自己矛盾がなく「双子のパラドックス」がパラドックスではないことを前提としてよいなら、その説明が最も簡単でありそれで十分である。しかし今「双子のパラドックス」では、その前提が成り立たないのではないか、という疑義が呈されているのであるから、「双子のパラドックス」で立ち止まっている人がそんな説明をきいても腑に落ちないであろう。だからここではわざわざボブに固定した座標系で一般相対性理論の手法を使ってすべての計算を進めて、最後にそれが第A章の結果と一致することを示すのである。
まずどのような座標系を使うかを決めることから始める。前章のアリスの視点では、アリスはずっと等速直線運動をしているので1個のミンコフスキー座標を使えばよかった。しかしボブの運動は一様ではないから、ボブの視点の座標系としてはそのような単純な1個の座標系を選ぶことはできない。ボブの視点の座標系の条件は、縦軸がボブの世界線と一致しその目盛りがボブの固有時と一致することである。しかしこれだけでは縦軸以外(𝑥 ≠ 0)の場所がまったく決まらない。そこで追加の条件として、等速直線運動をしているときはミンコフスキー座標を使うことにする。そして局面の切り替わり時に座標が不連続になると嫌なので、加速度運動をしているときに採用する座標系の最初と最後は、前後の局面のミンコフスキー座標と連続になるような座標系を選ぶことにする。
B.1. 出発局面
座標変換
出発局面で採用するS(1)系はどのような座標系であろうか。まずS(1)系の縦軸がS(0)系でどのように表されるべきかを考える。S(1)系の縦軸とはつまり出発局面におけるボブの世界線のことである。S(0)系は前章のアリスの立場のミンコフスキー座標と同じであるから、その座標系におけるボブの世界線はA.1節の表3で導出済みである。出発局面ではボブの固有時 𝜏𝐵 はS(1)系の座標時 と同じであるから先ほど定義した変数名を使って書き直すと、
となる。しかし(51)式は 軸上()の場所専用の変換式であって、それ以外の場所では使えないのであまり役に立たない。
一般の場所でも使えるように、次のような安直な変換を考えてみる。S(0)系から見てボブの速度は刻々と変わるが、ある瞬間だけを考えれば速度は一意に定まる。例えば
のときのボブの速度を 𝑣₀ とすると、表3より
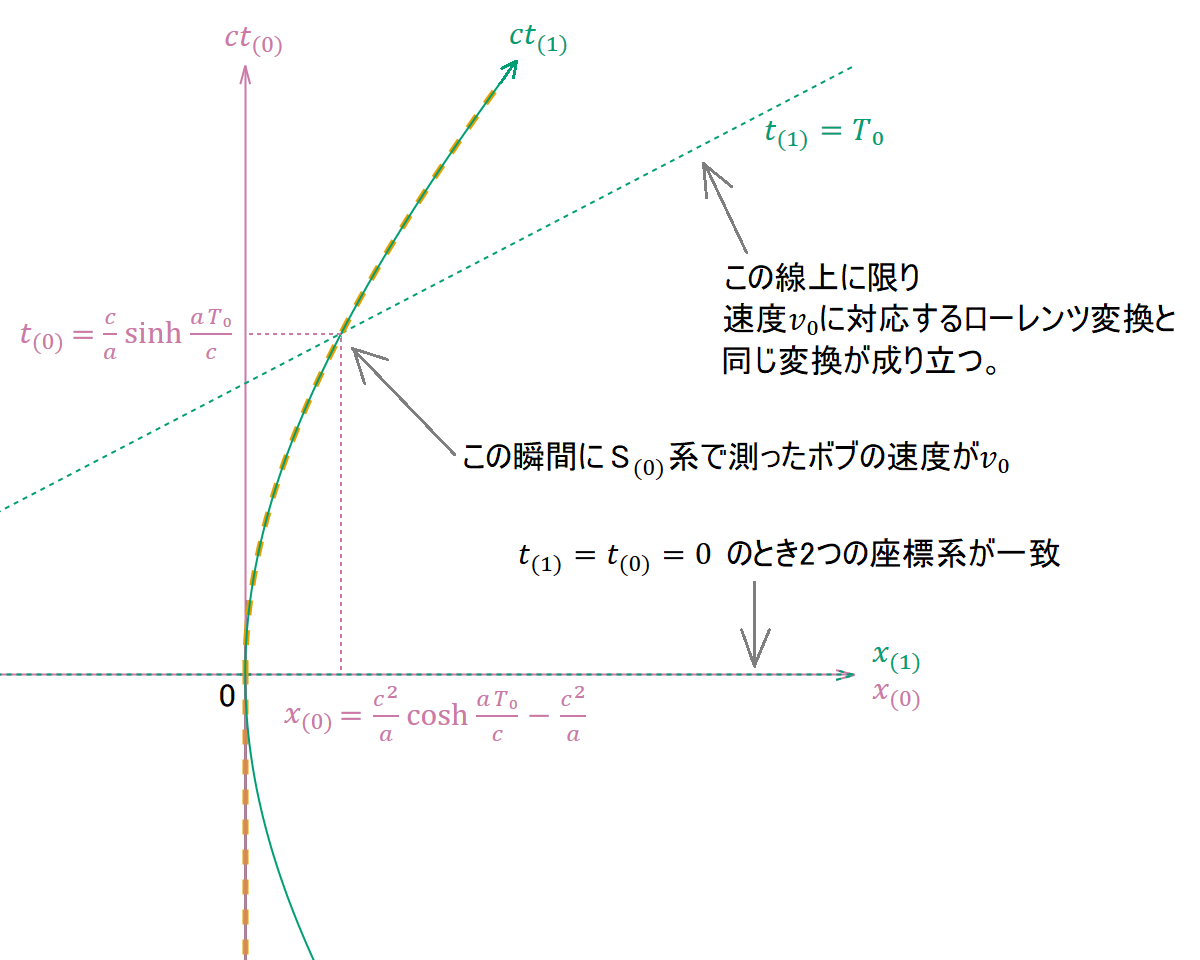
である。そこでその時点のボブから見て同時刻とみなせる事象、つまりS(1)系において の値にかかわらず を満たす事象については、速度 𝑣₀ に対応するローレンツ変換と同じ変換でS(0)系と結ばれていると仮定するのである。今、
であるから、速度 −𝑣₀ に対応するローレンツ変換を考えると
のようになる。しかし(52)式の変換は原点を原点に移す変換である。今欲しいのはS(1)系の点
がS(0)系の点
に対応するような変換である(この対応は(51)式に を代入して求めた)。そのため(52)式を平行移動して、
のようにする。これで のとき専用の変換式が導かれた。下図はこの座標変換の様子を図示したものである。ピンクはS(0)系の座標、緑はS(1)系の座標であり、茶色の太い破線はボブの世界線を表す。
(51)式と同じような適用範囲が狭いあまり役に立たない式がまたできたと思うかもしれないがそうではない。(51)式の適用範囲は
の値が具体的に0であるときに限定されていた。一方、(53)式の適用範囲は
の値が 𝛵₀ であるときに限定されてはいるが、 𝛵₀ の具体的な値は指定していない。もし時刻が変わって の値が 𝛵₀ でなくなり 𝛵₅ とか 𝛵₈ とかになったとしたら、(53)式の 𝛵₀ を 𝛵₅ とか 𝛵₈ とかに書き換えればその式が使えるのである。ということは(53)式の 𝛵₀ を に書き換えてしまえばいつでも使える式ができるわけである。そこで(53)式に
を代入しついでに整理すると、
のようになる。これがS(0)系とS(1)系との座標変換である。当然ながら(54)式の変換はもはやローレンツ変換ではなく、何か別の非線形な変換である。
ところで のときは
の値にかかわらず
となるし、
のときは が増加すると が減少することになり、ややこしい。そのような面倒な話は扱いたくないので、今後S(1)系では
である領域に限って話を進めることにする。もしS(1)系でアリスの世界線を計算した結果が
になってしまったらもう一度考え直しである。
ここで後々のために(54)式の逆変換を求めておく。(54)式の𝑥成分より、
であるから、これを(54)式の𝑐𝑡成分の右辺に代入すると、
である。 は の逆関数である。また、[(55)式]²−[(54)式の𝑐𝑡成分]²より、
であるが、今 だから複号は正を採用し、
である。なおこの変換ができるためのS(0)系の変域は
である。
ここまでで求めたS(1)系のような座標系をリンドラー座標と呼ぶ。この節の最初のほうで「安直な変換を考えてみる。」と言ったが、今のように時空が平坦で加速度が一定で加速度と速度の方向が同じである特殊な状況であれば、このような安直な方法でうまくいくのである。しかしいつでもこの考え方が通用するわけではない。
計量テンソル
S(1)系の計量テンソル 𝑔𝜇𝜈 を求める。ミンコフスキー座標S(0)系との変換式が求まっているから、計量テンソルの計算は単に公式に当てはめるだけなので簡単である。具体的には
を計算する。この式の右辺は見かけは1個の項だが、実際は ∑ が省略されており、上下にペアで現れる添え字は和をとるという規約が適用される。∑ を省略せずに書けば
でありこれは16個の項から成っている。
まず 𝜂𝛼𝛽 はミンコフスキー計量でありその値は
である。符号を逆に定義する流儀もあるので、気を付けてほしい。
次に座標変換の偏微分
を求める。S(0)系とS(1)系との座標変換の式は(54)式で導出したが、4成分とも省略せずに書けば
であるから、その偏微分は
であり、その他の成分は0である。まとめると、
のようになる。
これらを使って計量テンソルが求められる。例えば第00成分は、
のようになる。3個目の等号では(58)・(60)式のうち0であるものだけを代入した。5個目の等号では(58)・(60)式の残りを代入した。
他の成分も同様に計算される。途中の計算式で0になる項は面倒なのでもう書かない。
また、計量テンソルは対称テンソルであるから、
であり、これら以外の成分は途中の計算式のすべての項が0であるから結果も0である。まとめると、
である。また、反変成分は共変成分の逆行列であるが(61)式は対角行列であるから対角成分を逆数にすればよくて、
である。
クリストッフェル記号
S(1)系のクリストッフェル記号 𝛤𝜆𝜇𝜈 を求める。単に公式に当てはめるだけであり、具体的には
を計算する。この式の右辺は見かけは1個(かっこを展開すれば3個)の項だが、実際は ∑ が省略されており、上下にペアで現れる添え字は和をとるという規約が適用される。∑ を省略せずに書けば
でありこれは4個(かっこを展開すれば12個)の項から成っている。
(61)式より、計量テンソルの偏微分のうち0でないものは
だけである。これ以外の成分はすべて0である。
したがって、クリストッフェル記号のうち0でないものは
である。これら以外の成分はすべて0である。