B.2. 往路惰行局面
座標変換
往路惰行局面は
である。ここで採用するS(2)系は慣性系のミンコフスキー座標である。アリスには何の力も作用しないから、この座標系でアリスの運動はただの直線である。初期条件を当てはめればその直線は一意に決まる。初期条件として、この局面の開始時のアリスの固有時と位置と4元速度を使えばよい。
この局面の開始時は出発局面の終了時と同じである。その際、固有時 𝜏𝐴 はスカラーだから座標系に関係なくそのまま使えばよい。位置
に関しては、S(1)系で時刻
のときとS(2)系で時刻
のときの座標が一致するように座標系を定義するので、S(1)系での値
をそのまま使える。4元速度
に関しては、d𝜏𝐴 は座標系に依存しないし、
の瞬間に限り
,
,
が成り立つから、4元速度の 𝑥, 𝑦, 𝑧 成分もS(1)系での値
,
,
をそのまま使えばよい。しかし
は成り立たない(
の瞬間から無限小時間が経過した後は2つの座標系が一致しない)から4元速度の 𝑐𝑡 成分はS(1)系での値
をそのまま使うことはできない。とはいえ4元速度の自由度は3つしかないから、 𝑥, 𝑦, 𝑧 成分がわかっているならそれをもとにして 𝑐𝑡 成分を算出することができる。
以上のような理屈により、実はこの先の議論を進めるにあたってS(1)系とS(2)系との間の座標変換を求める必要はないのである。しかしながら具体的な確認をしないで最初から飛ばしてしまうと不満に思う人がいるかもしれないので、ここではわざわざ座標変換を求めて位置と4元速度に対してS(1)系からS(2)系への変換を行うことにする。
S(1)系とS(2)系との間の座標変換はゼロから考えなくても、前節の結果を流用することができる。S(2)系は前節に出てきた出発前のS(0)系と同様のミンコフスキー座標であるから、S(1)系⇔S(0)系の変換とS(1)系⇔S(2)系の変換はほとんど同じである。違いは、変換前後の2つの座標系が一致する時刻が、前者の変換では
であるのに対して、後者の変換では
であることだけである。ということは、S(1)系⇔S(0)系の変換である(59)式に対して両系を 𝑡 方向に 𝑇₁ だけ平行移動すればよいから、次のような置き換えをすればよい。
実際に(59)式に対して(94)式の置き換えをすると、
となる。これが位置ベクトルの変換式である。位置ベクトルでない4元ベクトルの反変成分の変換行列を求めるために(95)式を偏微分すると、
となる。これは当然ながら(60)式に対して(94)式の置き換えをしても同じものが得られる。4元速度の変換式は(96)式の変換行列を使って
のようになる。(95)・(97)式を使ってアリスの座標変換を行う。前節の最後で計算したように、S(1)系で測って
のときアリスの位置は
、4元速度は
である。これらを(95)式の第0成分に代入すると、
となり、(95)式の第1成分に代入すると、
となり、確かにいずれもS(1)系での値と同じになる。また、4元速度は(97)式より、
となり、確かに 𝑥, 𝑦, 𝑧 成分はS(1)系での値と同じになる。
運動方程式
アリスの速度はこの局面を通して一定である。その3次元的な速度 𝑣 を求める。今は(100)式より4元速度の第2・3成分(𝑦, 𝑧 成分)は0であるから、ミンコフスキー座標における4元速度の定義により次のような関係を満たす。
(102)式に(100)式の第1成分を代入すると、
となるが、(102)式より
と 𝑣 は同符号であることがわかるので、複号は負を採用し、
である。(100)式の第0成分と(103)式を(101)式に代入すれば、(101)式も満たされていることがわかる。
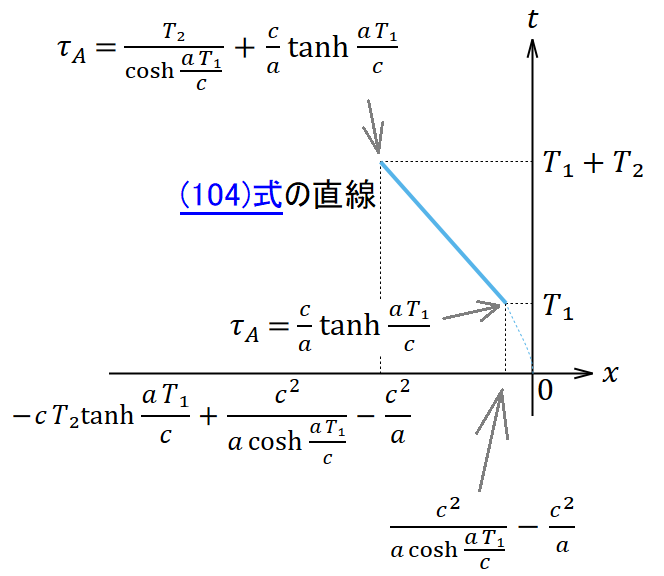
アリスの速度 𝑣 が によらず一定であるから、アリスの位置
は座標時 の1次関数になるので(103)式の速度と(98)・(99)式の初期条件の座標を使って
となる。また、アリスの固有時 𝜏𝐴 も座標時 の1次関数になるので(98)・(100)式の初期条件を使って
である。ここで固有時 𝜏𝐴 はスカラーだからその初期値は前節の最後で求めた値
をそのまま使った。以上でS(2)系におけるアリスの世界線が(104)・(105)式のように求まった。
往路惰行局面の終了時では、 であるからこれを(104)・(105)式に代入すると、アリスの固有時は
、位置は
であり、4元速度は一定だから(100)式と同じで
である。
B.3. 折り返し局面
折り返し局面は
である。ここで採用するS(3)系は、空間原点に静止するボブが𝑥軸正方向に大きさ𝑎の一定の重力加速度を感じる座標系である。これは物理的な状況はB.1節の出発局面のリンドラー座標S(1)系とまったく同じであり、ただ重力加速度の方向と人間が人為的に引いた座標系の 𝑥 軸の方向との関係が逆になっているだけである。ということはS(3)系の計量や測地線の方程式は、S(1)系のそれに対して 𝑥 軸の方向を逆にすればよい。
すなわちS(1)系の計量テンソル(61)式の を
に置き換えることにより、S(3)系の計量テンソルは
のように求まる。また、S(1)系の定義域は
であったから、これの を
に置き換えるとS(3)系の定義域は
になる。
次に初期条件としてこの局面の開始時 におけるアリスの固有時と位置と4元速度を求める。これはB.2節の往路惰行局面の終了時 のS(2)系における値をS(3)系に座標変換したものである。固有時 𝜏𝐴 はスカラーだから座標系に無関係なので初期条件は
である。位置と4元速度に関してはB.2節の最初のほうで述べたような理屈により、S(2)系とS(3)系が一致する
の瞬間に限り、4元速度の第0成分(𝑐𝑡 成分)を除いて座標変換しても値が変わらないから、初期条件は
である。4元速度の第0成分(𝑐𝑡 成分)の初期条件は、それを使ってもこの後で独立でない条件式が増えるだけで何も変わらないので実は求める必要はないのであるが、気になる人のためにここで求めておく。4元速度の大きさの2乗がいつでも −𝑐² に等しいという条件を使うのである。
(106)式より 𝜇≠𝜈 のとき であり、(112)・(113)式より
であるから、0でない項だけを残すと
であるが、 𝜏𝐴 が増えるとき も増えてほしいので複号は正を採用し、
である。
次にアリスの運動方程式を求める。この節の最初の方で述べたように、A.1節の出発局面のS(1)系における解に対して 𝑥 軸の方向を逆にすればよい。さらに(109)・(110)式より初期条件の第2・3成分(𝑦, 𝑧 成分)が0である点も同じであるから、それを適用した後の(80)〜(83)式(𝜏𝐴 によるパラメータ表示)または(85)・(86)・(88)・(89)式( の関数としての表示)に対して次のような置き換えをすればよい。
第2・3成分(𝑦, 𝑧 成分)はずっと0であるからこの節ではもう書かない。 𝜏𝐴 によるパラメータ表示である(80)〜(83)式に対して(115)式の置き換えをすると、
である。(85)・(86)・(88)・(89)式( の関数としての表示)に対して(115)式の置き換えをすると、
である。積分定数を定めるためには前者の組と後者の組のどちらを使っても(あるいは両方を少しずつ使っても)構わないが、ここでは計算が楽そうな前者の(116)〜(119)式を使う。(119)式の左辺と右辺に初期条件(111)・(107)・(108)式を代入すると、
のように𝐾₁₁が定まる。(118)式の左辺と右辺に初期条件(114)・(108)式を代入すると、
のように𝐾₁₀が定まる。今定めた(124)・(125)式の𝐾₁₁と𝐾₁₀が(117)式を満たすかどうか確認すると、
となって左辺と右辺が同じになるので確かに(117)式も満たされている。(118)・(119)式のそれぞれ右の等号は(117)式と同じことを言っているのだから、考えてみれば当たり前だ。少し上で4元速度の第0成分の初期条件を使う必要がないと言ったのはこのことである。
最後に残った𝐾₁₂を定めるため(116)式に初期条件(107)式と
および(124)・(125)式を代入すると、
のように𝐾₁₂が定まる。
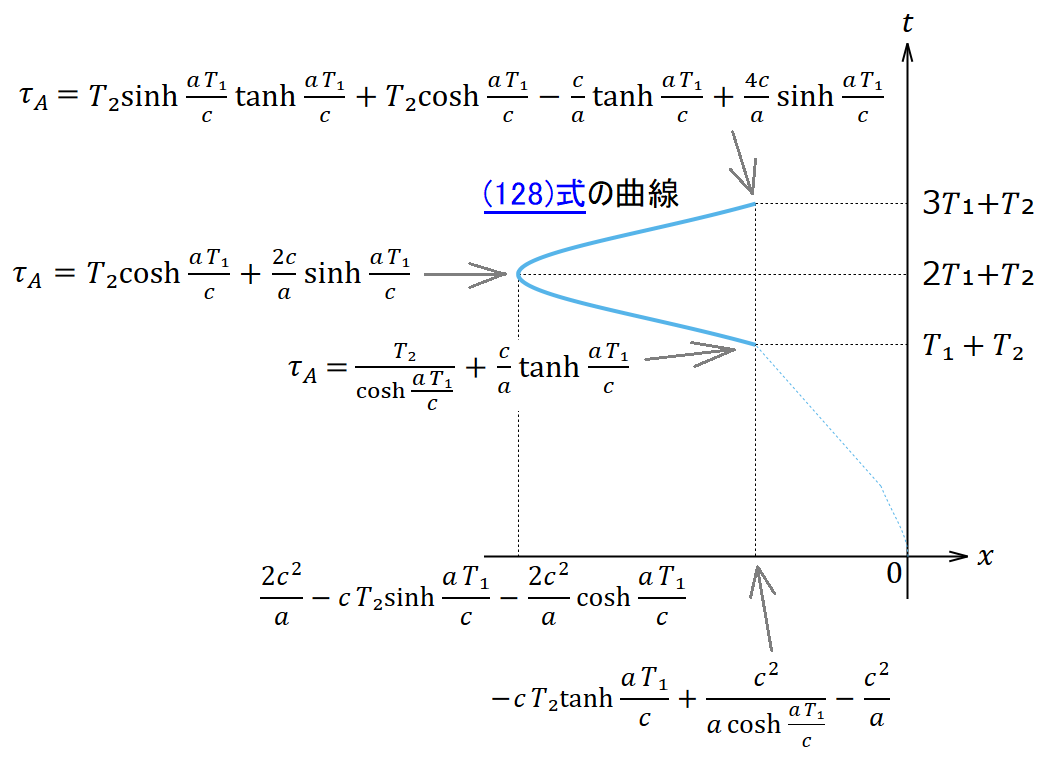
(124)〜(126)式で定まった積分定数の値を(120)〜(123)式に代入すれば、S(3)系で見たアリスの固有時と位置と4元速度は次のようになる。
だんだん式が長くなってきたが、大部分は定数であって変数は だけなので、それほどややこしい関数ではない。
ボブの固有時が
であるときに往路から復路に切り替わることが期待される。(130)式に
を代入するとアリスの4元速度の第1成分(𝑥 成分)は 0 となり、この瞬間に負から正に変わることがわかる。このとき、(128)式よりアリスの位置は
である。この位置はアリスがボブから最も遠くに離れたときの位置である。またこのときのアリスの経過時間は(127)式に
を代入すると
である。
折り返し局面の終了時では、
であるからこれを(127)〜(130)式に代入すると、アリスの固有時は
であり、位置は
であり、4元速度は
である。