2.2.3 空間の曲率が正の場合
表1で宇宙定数 𝛬 が正の場合の解は④〜⑥である。その中で空間の曲率が正である⑥の解
をここでは考える。これは減速収縮から加速膨張に転じる時空である。ここで動径座標に関して
という座標変換をする。このとき逆変換は
であり、その微分は
のようになる。これらを2乗すれば
である。(72)式を変形し(75)・(76)式を代入して座標変換後の線素の式を計算すると、
となる。これは計量の非対角成分である d𝑤d𝜌 の項があってわかりにくいので、計量が対角になるようにさらなる座標変換を考える。動径座標はもういじりたくないので、時間座標を座標変換することで対角計量を目指そう。新しい時間座標を 𝑣 として、今のところ未知のその変換と逆変換を
のように書く。すると、
であるから、これらを(77)式に代入すると
となる。ここで d𝑣d𝜌 の係数を0にすればよいのだが、
では困る(まともな座標変換にならない)から、
を満たすような座標変換をすればよい。ここで表記の簡略化のために
と置く。後で使うために場合分けをして 𝐴(𝜌) を 𝜌 で微分すると、
である。このとき(79)式より
と書ける。
𝐵(𝑣) は任意の関数であって具体的な形が未定であるが、それは後で決めることにしてとりあえずこのまま計算を進める。ここからは 𝐴 や 𝐵 の引数を表す (𝜌) や (𝑣) は省略する。(82)式より
であり、(83)式より
である。ただしドット ˙ は座標 𝑣 による微分 を表し、プライム ′ は座標 𝜌 による微分 を表す。(82)・(84)〜(87)式を(78)式に代入して座標変換後の線素の式を計算したいが、(78)式はかなり長くなっているので一気に代入すると大変である。そこで計量の成分ごとに計算しよう。
(78)式の d𝑣² の係数は
である。ここに(80)式を代入すると、 0 ≦ 𝜌 < 𝐿 の領域では
となり、 𝐿 < 𝜌 の領域では
となる。まとめると
のようになる。
(78)式の d𝑣d𝜌 の係数は、それが0になるように 𝑣 を決めたのだから当然0である。
(78)式の d𝜌² の係数は
である。ここに(80)・(81)式を代入すると、 0 ≦ 𝜌 < 𝐿 の領域では
となり、 𝐿 < 𝜌 の領域では
となる。したがってどちらの領域でも
のようになる。
これら以外の計量の成分は座標変換しても変わらない。以上により線素の式は
となる。あとは 𝐵(𝑣) の形を好きなように決めればよいのだが、ここで仮に 𝑔₀₀ が 𝑣 を含まなければ静的な計量にすることができて良さそうである。そのためには
とか
という微分方程式を解けばよい(右辺は正の定数なら何でもよいが、1にしておくのが楽である)。これらは両辺の平方根を 𝑣 で積分するだけで解けるので計算過程を省略していきなり答えを書くと、
である。下側の式についている複号は 𝑤 と 𝑣 の符号が同じになるように変換することと定義しておく。(89)式を(88)式に代入すれば
となる。この計量は⑤の解(平坦な空間のFLRW計量)を座標変換した(36)式と同じであり、 𝜌 < 𝐿 において静的である。曲率が正の空間が減速収縮から加速膨張に転じると思っていた⑥の解は、ドジッター時空と同じものだったのだ。
ここでは2段階で座標変換をしたが、最初の座標系と最後の座標系が結局どういう関係になっているのかを求めておこう。
0 ≦ 𝜌 < 𝐿 の領域では、(80)・(89)式を(83)・(82)式に代入すると、
であるから、座標変換は
であり、逆変換は
である。
𝐿 < 𝜌 の領域では、(80)・(89)式を(83)・(82)式に代入すると、
であるから、座標変換は
であり、逆変換は
である。
場合分けと式変形が長くなって全体が見づらいので結果だけをもう一度書いておくと、
である。まだ 𝜌 = 𝐿 の領域が残っているが、これはどうしようもない。その領域は元の座標系で考えれば(73)・(74)式より
ということになるが、この関係を満たす 𝑤 と 𝑟 を(97)式に代入すると、 𝑤 = 0 でない限り新しい座標系では 𝑣 → ±∞ となって無限の未来/過去に飛ばされてしまう。逆に新しい座標系における 𝜌 = 𝐿 を元の座標系に変換するために(99)・(100)式に代入すると 𝑣 にかかわらず
となり1点に集まってしまう。だから 𝜌 = 𝐿 となる線上(4次元時空内で考えれば3次元超曲面上)の領域に限りこの座標変換は諦めることにする。
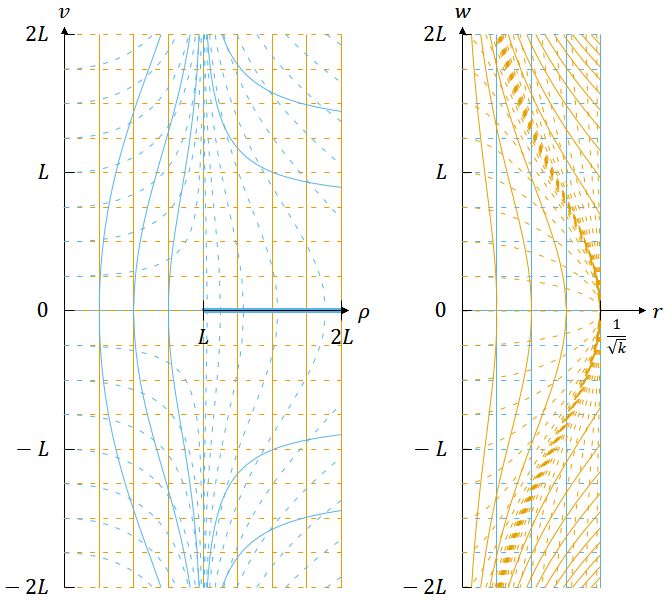
以上の関係を図示したものが図7である。茶色で描かれた座標系(𝜌 < 𝐿 において静的; (90)式)と青色で描かれた座標系(𝑘 > 0 のFLRW計量; (72)式)は、 𝜌 = 𝐿 の領域と 𝑣 = 0 (𝜌 > 𝐿) の領域を除いて一対一に対応する。後者の座標系は時空の半分の領域を覆うのだったから、前者の座標系も時空のほぼ半分の領域を覆っていることになる。
図7. スケール因子を
としたFLRW計量(表1の⑥)の座標変換。
茶色の線は 𝜌 < 𝐿 において静的な座標系、青色の線はFLRW計量の座標系を表す。後者は
の範囲で定義される。
左図で青色の太線 𝑣 = 0 (𝜌 > 𝐿) はその上下両側の時空がつながっていないことを表す。その半直線は下側から見れば
のうち 𝑤 < 0 の部分に対応し、上側から見れば
のうち 𝑤 > 0 の部分に対応する。 𝜌 = 𝐿 の線上の領域は、青色の座標系の
の1点に対応する。右図で茶色の破線が密集している
(𝑤 ≠ 0) の線上の領域は、茶色の座標系に対応する領域がない。これらの線上を除いて2つの座標系は一対一に対応する。